

在国家自然科学基金基础科学中心项目、杰出青年基金项目、优秀青年基金项目和青年基金项目(批准号:72288101, 71825004, 72122003, 72201029)资助下,北京交通大学系统科学学院高自友教授团队针对稀疏数据场景下的道路交通状态估计问题开展研究,设计了基于物理信息深度学习(Physics-informed deep learning, PIDL)的交通状态(速度和密度)估计框架。该成果以“Physics-informed deep learning for traffic state estimation based on the traffic flow model and computational graph method”为题,于2023年发表在《Information Fusion》期刊上,论文链接: https://doi.org/10.1016/j.inffus.2023.101971。
交通状态估计(TSE)是智能交通系统的一项关键任务。然而,交通数据质量经常受到设备安装位置、数据采集频率、传输过程中的干扰等因素的影响,导致数据稀疏或数据缺失问题,因此该项工作极具挑战性。为了解决数据稀疏情况下的交通状态估计问题,提出了一种结合计算图和物理信息深度学习方法的交通状态估计模型。首先,应用计算图方法确定交通流基本图的参数,该参数被嵌入到计算图框架中,通过变量的前向传播和误差的反向传播准确估计参数值。随后采用PIDL方法,以基于Greenshields基本图的LWR模型为例实现交通状态估计。PIDL充分利用了数据驱动和模型驱动方法的优势,实现了精确的交通状态估计。利用NGSIM数据集以两种稀疏数据场景下的交通速度和密度为例进行了案例研究:环路探测器和探测车辆场景。实验结果表明,基于有限的观测数据,PIDL可以准确重建整个路段的交通状态。此外,与纯粹的深度学习方法和其他基线模型相比,PIDL在数据稀疏的情况下表现更好,从而证明了将领域知识与深度学习框架相结合的可行性。文章充分考虑了数据稀疏性问题,并通过应用PIDL方法有效解决了这一问题,实现了精确的交通状态估计,对实际应用中的交通流控制和管理具有重要意义。

图1 模型框架
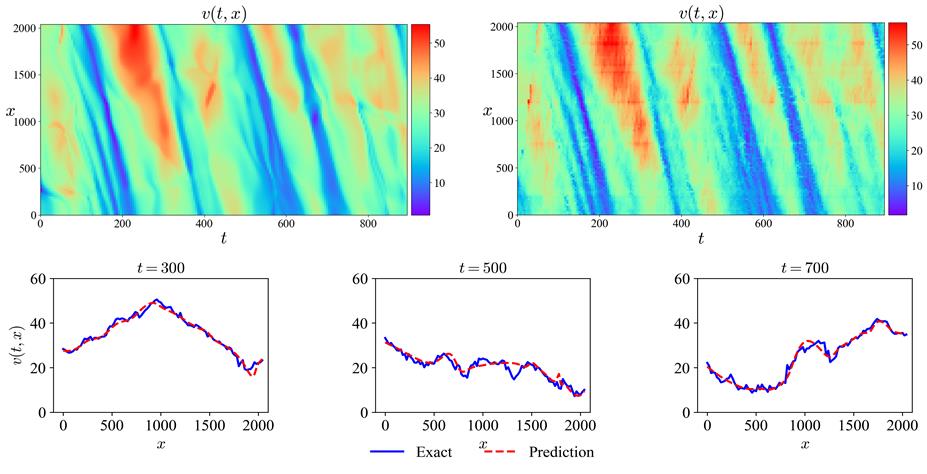
图2 环路探测器场景实验效果(上图:速度估计值和真实值比较时空图,左侧为估计值,右侧为真实值。下图:特定时刻的速度估计值和真实值对比图。)
Zhang Jinlei, Mao Shuai, Yang Lixing*, Ma Wei, Li Shukai, Ziyou Gao*. Physics-informed deep learning for traffic state estimation based on the traffic flow model and computational graph method[J]. Information Fusion, 2024, 101: 101971.(人工智能领域顶级期刊,SCI 影响因子18.6)